Xoran MiniCAT and Stryker TGS: Streamlined Workflow and Exceptional Precision
Author: Robert Snow, Xoran Technologies, LLC
Abstract: In-office, point-of-care Computed Tomography (CT) scanners support image-guided surgery (IGS) of the paranasal sinuses and skull base, including office-based procedures such as balloon dilation. As navigational systems improve and its use evolves, image-to-pointer accuracy needs regular re-evaluation. This pre-clinical study reviews the accuracy of image-guided surgical navigation using high-resolution, low dose CT scan images from the MiniCAT™ 2020 and MiniCAT™ IQ compact CT scanners. A phantom with radio-opaque markers is scanned on the two systems and images are transferred electronically within minutes to a Stryker electromagnetic navigation system. Using the MiniCAT 2020 and MiniCAT IQ CT systems, submillimeter positional accuracy at 0.41mm for navigating the paranasal sinuses is demonstrated, which is well below the expected 1mm – 3mm of accuracy.
Keywords: in-office Computed Tomography, Image Guided Surgery, navigation, registration, Cone Beam computed tomography, Stryker, TGS, Xoran, MiniCAT 2020, MiniCAT IQ
Introduction: As minimally invasive procedures move from the hospital to the otolaryngology practice, confirming that the navigation system integrates seamlessly with existing technologies such as CT is essential. Using a point-of-care CT such as MiniCAT 2020 (optimized for sinuses) or MiniCAT IQ (with standard-shattering 70-micron resolution for temporal bone and sinus) gives providers real-time CT images that can be sent directly to the IGS system within minutes. These MiniCAT CT scan images are sent reliably, quickly, and directly to the Stryker SCOPIS Target Guided Surgery (TGS) system. The Stryker TGS system is designed for ease-of-use and cost-effectiveness, including an open platform and 10x use instruments. Combining the power of Stryker and Xoran Technologies—both known in the ear, nose, and throat industry for excellent customer service and a broad turnkey solution—this study demonstrates above-industry-standards registration accuracy of the Stryker system when paired with high-resolution, fast, low radiation dose Xoran MiniCAT scans.
This study itself is a result of a partnership between Xoran Technologies and the Stryker Corporation. It was conducted to show the registration accuracy of MiniCAT 2020 and MiniCAT IQ 20-second scan images when used with the Stryker TGS Navigation System. In 1998, Vorbeck et al measured the accuracy of computer navigation in ENT sinus surgery and reported a precision of 1 to 3 mm. Labadie et al then found in 2005 that IGS used in rhinology generally report mean accuracies of 2 mm or less.
The inability to register patients consistently and accurately can lead to inaccurate patient data for surgical needs. The difficulty of registering and achieving accuracy can be a challenge. The Xoran/Stryker study shows not only the ability to register quickly and consistently, it shows a high level of accuracy with repeated studies, when registration is completed with the pairing of the Stryker system with a MiniCAT system.
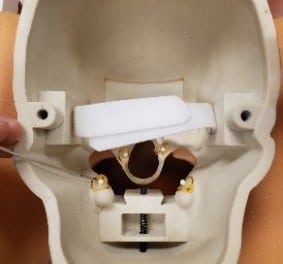
Methods:A head phantom (Stryker Inc., Kalamazoo, MI) with simulated bony sinus anatomy and facial features was used for imaging and navigation tests. Radio-opaque spherical markers (CT-Spots, Beekley Medical) were placed as target points around the phantom and used to measure field tracking accuracy. Office based CT scans were obtained from a Xoran MiniCAT 2020 and MiniCAT IQ (Xoran Technologies, Ann Arbor, MI), and transferred to a TGS electromagnetic surgical navigation system (Stryker). One CT protocol from each of the MiniCAT systems was used. For each test, the reconstructed image volume of the head phantom was transferred in high-resolution DICOM format to the Stryker system and registered using the standard four-point registration method. To evaluate target registration error (TRE), the radio-opaque spheres at different positions around the head phantom. Within the TGS software, a Planning Point was placed at the center of each sphere. Each sphere was then touched with a tracked pointer (Stryker Precision Pointer Electromagnetic). Visual confirmation, as well as tactile feedback, ensured the pointer tip was touching the surface of each sphere. The Accuracy Measurement Point feature of the TGS software would gather 75 points and calculate the mean distance from the tip of the pointer to the Planning Point at the center of the sphere. TRE was found by subtracting the radius of the sphere from the mean distance. The TRE measurements were made by three individuals, gathering three points per marker to account for interrater variability.
Image 1: Phantom with Radio-opaque Target Spheres and the MiniCAT™ 2020
|
Phantom with patient tracker |
Phantom reverse showing |
Precision |


Image 2: Equipment Used
|
TGS Navigation |
MiniCAT™ 2020 |
MiniCAT™ IQ |


Imaging Parameters: The acquisition and reconstruction parameters are based on standard settings available on the MiniCAT 2020 and MiniCAT IQ CT scanner—0.4 mm reconstruction voxel size with 20-second scans each. The phantom was scanned once on each scanner using the acquisition and reconstruction methods designed for use with surgical navigation systems. Axial slices from each image volume were exported as DICOM 3.0, with pitch and thickness to match the voxel size, to a USB drive and imported to the TGS system. A four-point landmark registration method was used to register the phantom.
Table 1: Imaging Parameters
|
CT System |
Technique: (KvP / mA) |
Tube Current (mAs) | # of Projection Frames | Scan Time (s) | Reconstruction Voxel Size |
|
MiniCAT 2020 |
120 / 5.8 |
48.3 | 600 | 20 | 0.4mm |
| MiniCAT IQ | 120 / 7 | 48.3 | 600 | 20 | 0.4mm |
After each imported scan, planning points were placed at the center of each fiducial. After scan registration, the Stryker Precision Pointer was used along with visual and tactile feedback to confirm that the tip of the pointer was in fact on the sphere surface. For each point gathered, the Accuracy Measurement Point function of the software was used to gather the closest planning point, and 75 sample pointer positions were gathered within a few seconds. During that time, the tester held the pointer as steady as possible to a single location. The software would gather those 75 pointer locations and report the Mean Error to Reference (distance) from the tip of the pointer to the refence point. The 2mm radius of the sphere was subtracted from this measurement to provide the radial difference between the planning point and the mean pointer tip position. Image 3 shows one of the testers registering the phantom and placing the pointer on the fiducial. Image 4 shows screen grabs from the TGS software after placing the planning points in the fiducial centers, and a sample screen after using the Accuracy Measurement Point feature of the software. TRE measurements are shown in Table 2.
Image 3: Tester Workflow
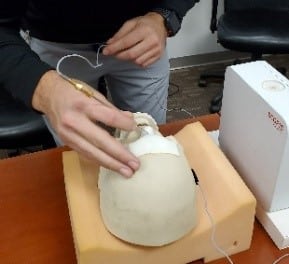 Registering the phantom Registering the phantom |
 Gathering a point and general setup Gathering a point and general setup |
 Closeup of tester gathering a point Closeup of tester gathering a point |
Image 4: TGS software workflow
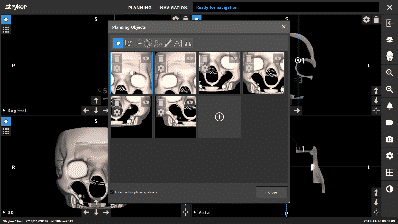 Placement of the planning points Placement of the planning points |
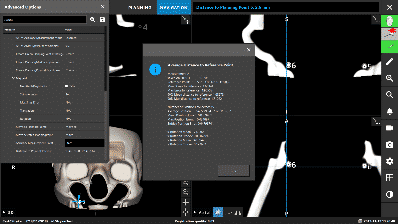 After a point has been gathered After a point has been gathered |
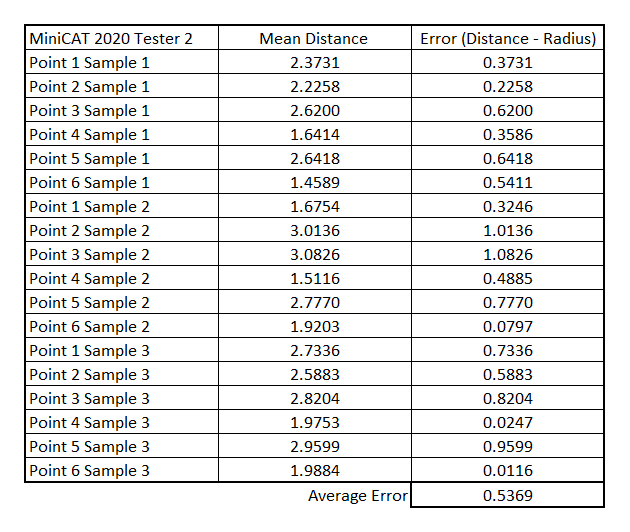
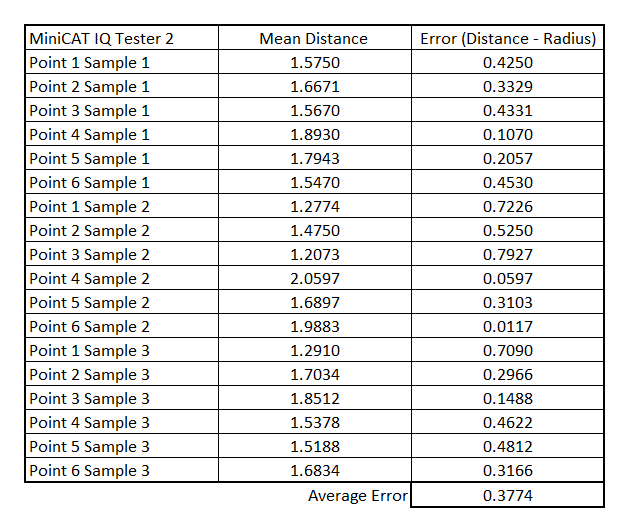
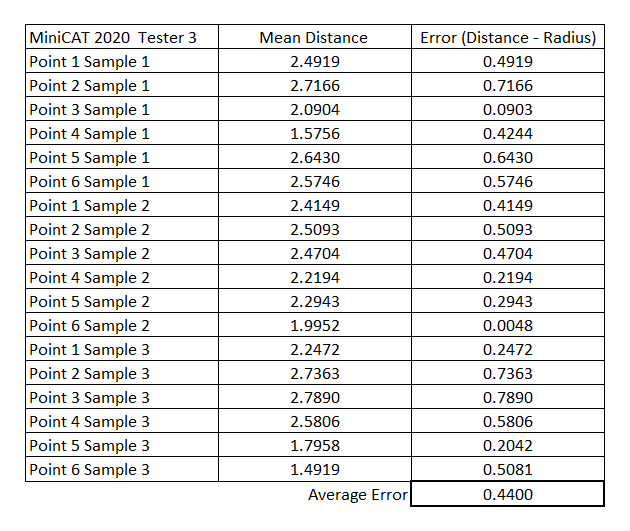
Table 2: Scan Accuracy Measurements (Mean distance and Error in mm)
| MiniCAT 2020 Scan Accuracy Measurements
|
MiniCAT IQ Scan Accuracy Measurements
|
 |
 |
 |
 |
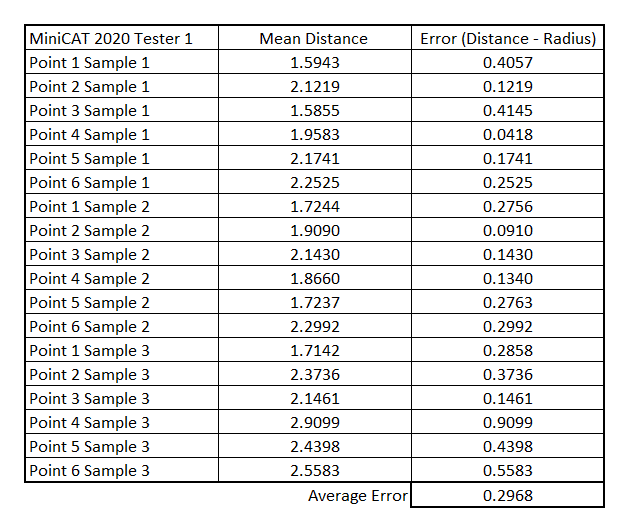
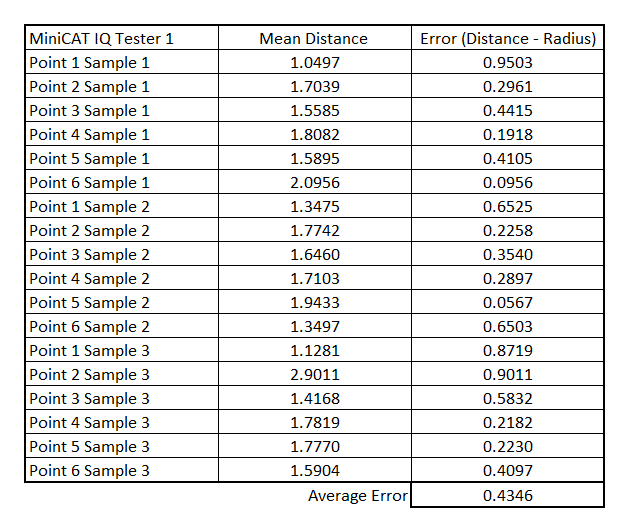
Table 3: Summary of Scan Accuracy Measurements (All measurements in mm)
|
|
Registration Quality | Experienced Users | Novice Users | Overall |
| MiniCAT 2020 | 120 / 5.8 | 48.3 | 600 | 20 |
| MiniCAT IQ | 120 / 7 | 48.3 | 600 | 20 |
| Overall | N/A | 0.3785 | 0.4496 | 0.4141 |
Discussion: The average of all TRE values measured was 0.41mm. The center of each fiducial was determined prior to the phantom registration, and the same planning points were used for each tester. This was done to provide a more reliable average value across testers. For this study, the scope was limited to three testers, two (Tester 1 and Tester 3 for MiniCAT 2020, Tester 3 for MiniCAT IQ) with prior hands-on navigation systems experience, and two testers (Tester 2 for MiniCAT 2020, Tester 1 and 2 for MiniCAT IQ) who had no prior hands-on experience with surgical navigation systems. One phantom registration was used for each scan prior to gathering the sample points from all testers. The measurements were taken on the bony areas of the near the location of typical sinuses to create a full representation of the field of view. It is generally understood that that accuracy between these points should be equal to or better than what was achieved in this test.
Limitations: The accuracy measurements depend upon the quality of the registration. For this test, registration accuracy was recorded as shown in Table 3. As shown, user skill is also a factor. Additional testers would produce a broader representation of skill and ability. The TRE measurement method used is a three-dimensional vector measurement; however, it only captures the radial component of distance away from sphere center. Alternative methods could provide a more robust TRE measurement.
Conclusion:The results show that MiniCAT™ 2020 and MiniCAT IQ™ CT systems can be used successfully to provide images to the Stryker TGS surgical navigation, yielding an average accuracy of 0.41mm around the paranasal sinuses, which is well below the expected 1mm – 3mm of accuracy. While voxel size on scan reconstructions can go as low as 70 microns (0.07mm), the MiniCAT provided high-resolution images at 0.4mm voxels, which were exported using DICOM. With the peace-of-mind that comes with a navigation system’s registration accuracy, providers can proceed with the procedure using the broad portfolio of Stryker ENT products and instruments, including the TGS easy-to-use surgical planning tools as well as augmented reality features. Stryker’s partnership with Xoran has made it easy for ENT practices to implement this “imaging and navigation” combined solution, even in these uncertain times. Stryker Financial, partnered with Xoran, provides uniquely tailored programs to meet the needs of solo practitioners, small, mid-sized, and large group practices. In these uncertain times, go with the proven market leaders in ENT—Xoran and Stryker.
Acknowledgement: We would like to thank Stryker for providing us their surgical navigation system and for the support interfacing with MiniCAT 2020 and MiniCAT IQ to perform the tests.
Published: May 29, 2020
1760-60255