![]() Accuracy of Acclarent TruDi™ Navigation System using MiniCAT 2020 and MiniCAT IQ In-Office CT
Accuracy of Acclarent TruDi™ Navigation System using MiniCAT 2020 and MiniCAT IQ In-Office CT
Keywords: in-office Computed Tomography, Image Guided Surgery, navigation, registration, Cone Beam computed tomography, Acclarent, TruDi, Xoran, MiniCAT 2020, MiniCAT IQ, ENT navigation, sinus surgery, in-office navigation
Abstract: Computed Tomography (CT) scanners are used to support image-guided surgery (IGS) of the paranasal sinuses and skull base as well as office-based procedures such as balloon sinuplasty. Image-to- pointer accuracy needs regular re-evaluation as systems improve. This pre-clinical study evaluates the accuracy of image-guided surgical navigation using images from the MiniCAT™ 2020 and MiniCAT IQ CT scanners, by Xoran Technologies. A phantom with radio-opaque markers was scanned on two scanners and the images transferred to Acclarent’s TruDi™ electromagnetic navigation system. Using these systems, submillimeter positional accuracy for navigating the paranasal sinuses is demonstrated.
Methods: A head phantom (Acclarent Inc., Irvine, CA) made from materials to simulate the bony and soft tissue regions of the sinus anatomy and facial features was used for imaging and navigation tests. Radio- opaque spherical markers (CT-Spots, Beekly Medical) were placed as target points around the phantom sinus anatomy and used to measure field tracking accuracy. The radio-opaque markers were strategically placed on the edge of each sinus to account for the largest volume coverage of the anatomy. The center of each marker was located on the CT scan with high accuracy by placing planning points at the center of each spherical radio-opaque marker using the TruDi™ Navigation System. Office-based CT scans were obtained from a Xoran MiniCAT™ 2020 and MiniCAT™ IQ (Xoran Technologies, LLC, Ann Arbor, MI), and transferred to a TruDi™ Navigation System (Acclarent). One CT protocol from each of the MiniCAT systems was used. For each test, the reconstructed image volume of the head phantom was transferred in high- resolution DICOM format to the Acclarent system and the internal coordinate system of the TruDi™ Navigation System was mapped to the reference CT image using the standard 4-point and surface tracing registration method. To evaluate target registration error (TRE), the radio-opaque spheres at different positions around the head phantom were touched with a tracked guidewire. The guidewire used is part of Acclarent’s RELIEVA SPINPLUS® NAV Balloon Sinuplasty System, which includes a handpiece to advance the guidewire. A small modified plastic tube was also used to visually confirm the guidewire tip was touching the surface of each sphere, as well as tactile feedback. TRE was calculated by measuring the distance from the center of each sphere to the location of the guidewire crosshair on the digital display, and then subtracting the radius of the sphere. All TRE measurements were made by three individuals, gathering three points per marker to account for interrater variability and each individual performed a new registration process prior to calculating the TRE data.
Image 1: Phantom with Radio-opaque Target Spheres
|
Phantom with patient tracker attached on emitter |
Phantom reverse showing fiducials around sinuses |


Image 2: Equipment Used
|
TruDi™ Navigation System |
MiniCAT™ IQ Point-of-care CT scanner |
MiniCAT™ 2020 Point-of-care CT scanner |


Imaging Parameters: The acquisition and reconstruction parameters are based on standard settings available on the MiniCAT™ 2020 and MiniCAT™ IQ CT scanner. The phantom was scanned once on each scanner using the acquisition and reconstruction methods designed for use with surgical navigation systems. Axial slices from each image volume were exported as DICOM 3.0, with pitch and thickness to match the voxel size, to a USB drive and imported to the TruDi™ Navigation System. A 4-point and surface tracing registration method was used to register the phantom.
Table 1: Imaging Parameters
|
Scanner |
Technique: (KvP / mA) |
Tube Current (mAs) | # of Projection Frames | Scan Time (s) | Reconstruction Voxel Size |
|
MiniCAT 2020 |
120 / 5.8 |
48.3 | 600 | 20 | 0.4mm |
| MiniCAT IQ | 120 / 7 | 48.3 | 600 | 20 | 0.4mm |
For each imported scan, planning points were placed at the center of each fiducial using the TruDi™ software. After the completion of registration process by each operator, the RELIEVA SPINPLUS® NAV and a modified plastic tube, that assisted with the placement of the guidewire tip onto the surface of the radio-opaque markers, were used along with visual and tactile feedback to confirm that the tip of the guidewire was in fact on the sphere’s surface. For each point gathered, another planning point was placed at the navigated tip of the guidewire which is indicated by the cross-hair on the TruDi™ navigation system screen. The x, y, and z position of each marker was used to determine the distance from the center of the fiducial to the navigated tip. The 2mm radius of the sphere was subtracted from the measurement to provide an estimate of the radial difference between tracked and actual probe tip position. Image 3 shows one of the testers registering the phantom and placing the guidewire on the fiducial. Image 4 shows screen grabs from the TruDi™ software during registration, placing the planning point on the fiducial center, and placing a planning point at the location of the navigated instrument tip. TRE measurements are shown in Table 2.
Image 3: Tester workflow
|
Registering the phantom |
Handpiece with modified plastic tube and extended guidewire |
Navigating to the left frontal fiducial |



Image 4: TruDi™ software workflow
|
Placing a planning point in the left frontal fiducial |
Registering the phantom |
Navigated planning point on the left frontal fiducial |



Table 2: Scan Accuracy Measurements (All x, y and z in cm, Distance and Error in mm)
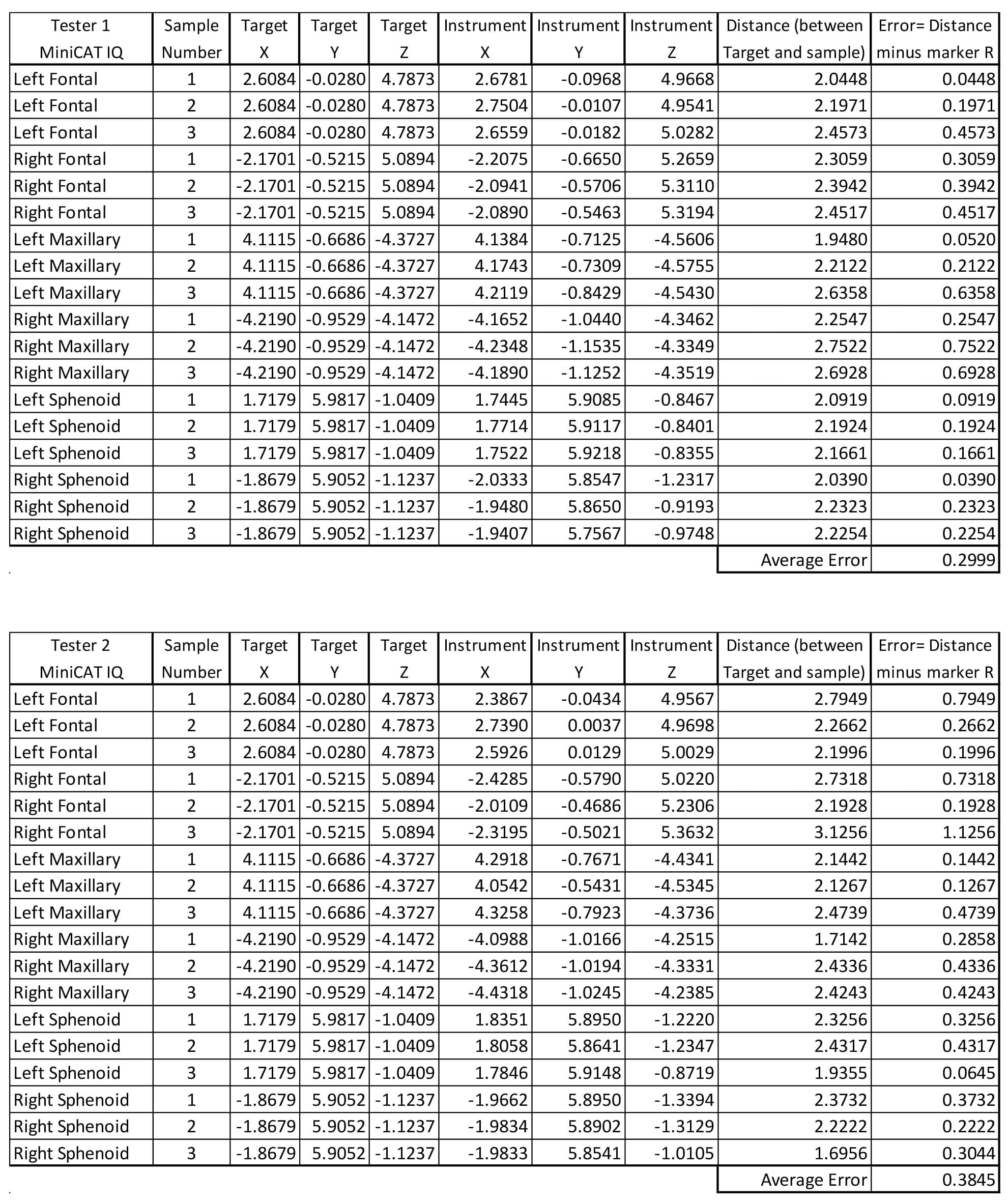
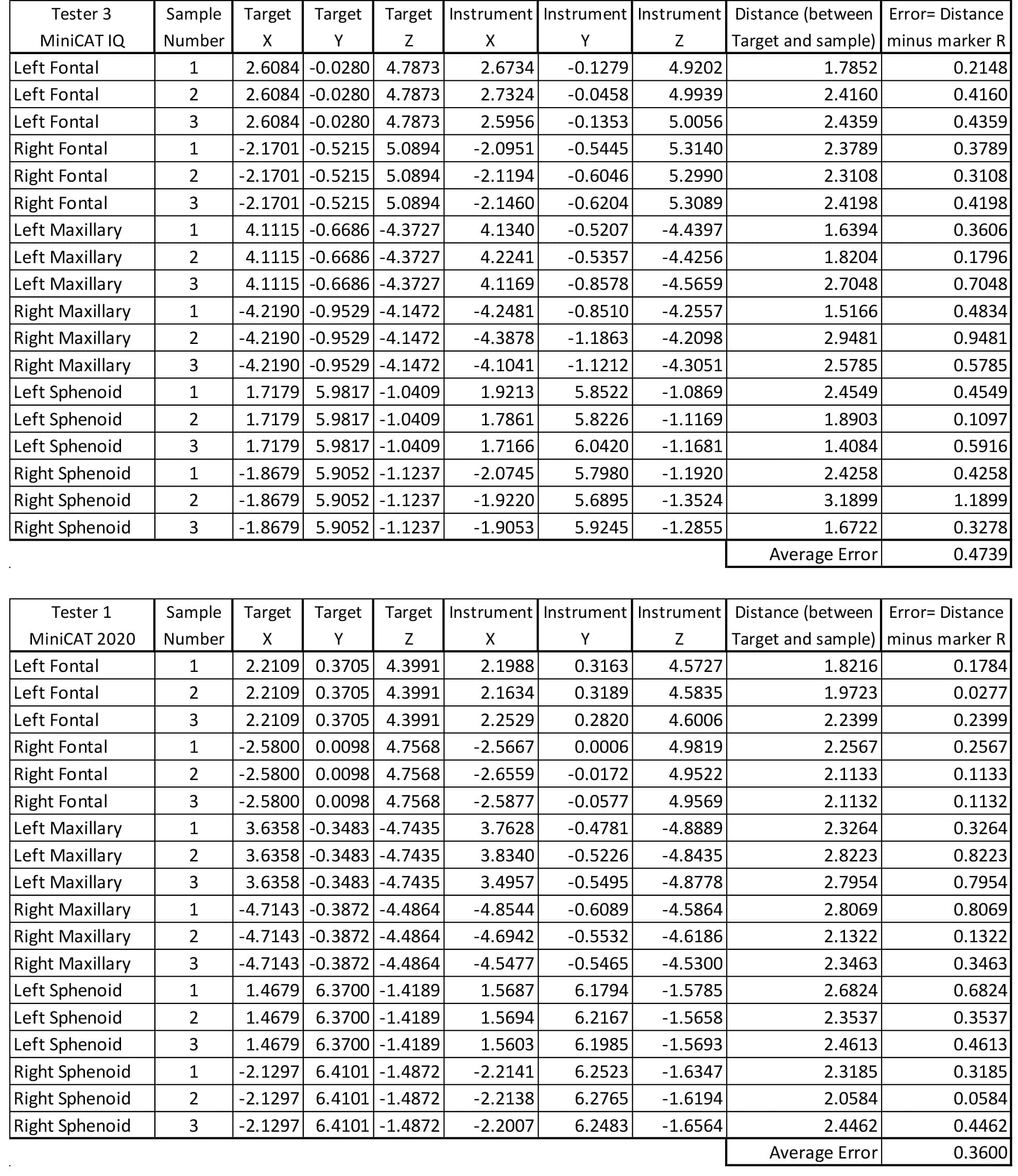
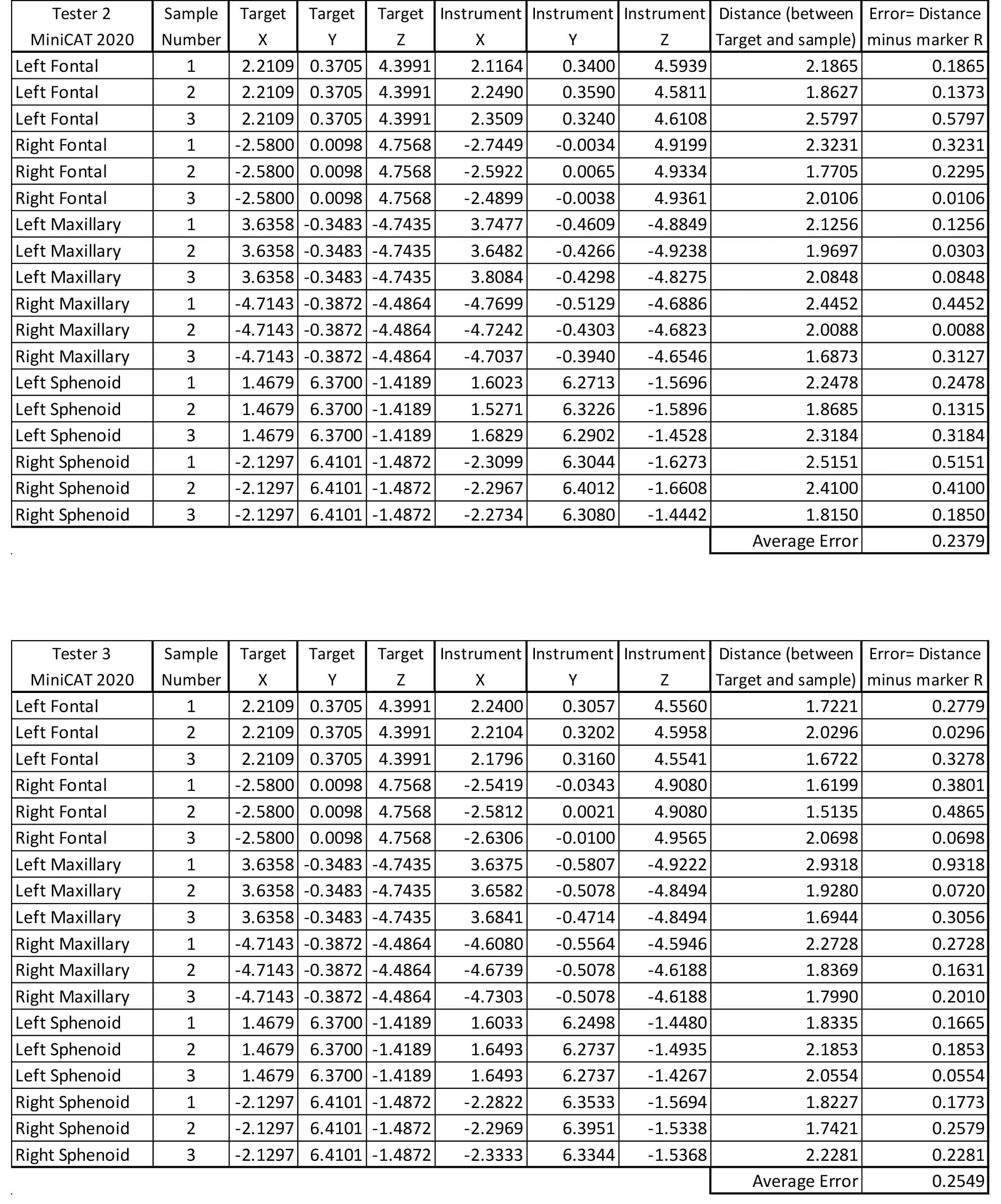
Table 3: Summary of Scan Accuracy Measurements (All measurements in mm)
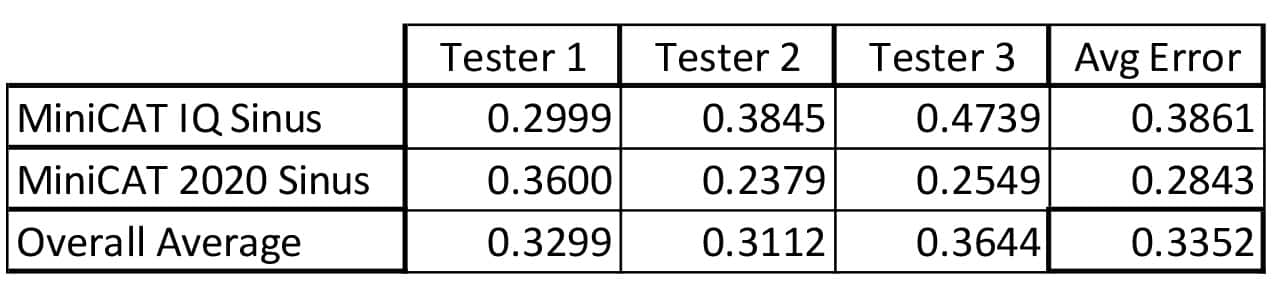
Discussion: The average of all TRE values measured was 0.34 mm. The center of each fiducial was determined prior to the phantom registration, and the same central planning points were used for each tester. This was done to provide a more reliable average value across testers. For this study, the scope was limited to three testers, two (Tester 1 and Tester 3) who were familiar with the Acclarent navigation system, and one (Tester 2) who was familiar with navigation, but not the Acclarent system specifically. Each tester performed their own phantom registration prior to gathering the sample points. The measurements were taken outside of the phantom sinuses to create a fuller representation of the field- of-view. It is generally understood that that accuracy within this volume should be equal to or better than what was achieved in this test. The TruDi™ consist of 5 electromagnetic emitting coils. Through continuous system monitoring, three out of the five coils are utilized at any given moment resulting in the highest possible accuracy.
Limitations: The accuracy measurements depend upon the quality of the registration. For this test, registration accuracy was not recorded after the registration to differentiate system capabilities vs. user error introduced during the registration process. User skill is also a factor. Additional testers would produce a broader representation of skill and ability. The TRE measurement method used is a three- dimensional vector measurement; however, it only captures the radial component of distance away from sphere center. Alternative methods could provide a more robust TRE measurement.
Conclusion: Taking advantage of the MiniCAT™ 2020 and MiniCAT IQ™ low dose protocols, the CT scans evaluated produced high-resolution image quality enabling submillimeter (0.34mm average) accuracy for electromagnetic image guidance with TruDi™ Navigation System.
Acknowledgement: Xoran would like to thank Acclarent for providing us their surgical navigation system and for the support interfacing with MiniCATTM 2020 MiniCATTM IQ to perform these tests.
| Download the White Paper PDF. |
2019 Xoran MCO 1588